
 资讯
资讯
当你闭上眼睛之(zhī)后,即使一片漆黑,但(dàn)你还可以(yǐ)通过肢体的感触,来(lái)感知(zhī)这个世界,想(xiǎng)象一下这是(shì)一种怎样的体验,
现在(zài)人工智能越来(lái)越发达,机(jī)器人也(yě)有同(tóng)样的能力(lì)了。
这个(gè)年代,是一个高科(kē)技的时代,机器人的发(fā)明已经(jīng)不(bú)是什么新鲜(xiān)的事情了,而且大多(duō)数的机(jī)器(qì)人都(dōu)是(shì)通(tōng)过(guò)电(diàn)力(lì)驱动(dòng)的。
科学家们发明的机器(qì)人(rén)都是以(yǐ)一种不灵活的冷(lěng)冰冰形象出(chū)现,因为它们那(nà)看起来非常僵硬的身体无(wú)法灵活的根据环境来工(gōng)作,所(suǒ)以(yǐ)这种机(jī)器人就被称为是刚(gāng)性机器人,但随(suí)着(zhe)科(kē)技越来越发达(dá),它们(men)正在积极转型成为软体机器人。
此(cǐ)前,机器人大(dà)多通过运动相机(jī)、激(jī)光雷达(dá)系统以及算法来获取(qǔ)并(bìng)生成环境三(sān)维(wéi)信息。
但(dàn)这(zhè)种视觉系统对于现在的机(jī)器人新贵——软(ruǎn)体机器(qì)人来(lái)说似乎(hū)不太适用。

▲ 来自哈(hā)佛大学的(de)软体机器人
软(ruǎn)体(tǐ)机器人因骨骼(gé)惊奇、身体柔软,可(kě)以穿梭于一般机器人难以触(chù)达的地方,但是对于在这些(xiē)「犄角旮旯」里面如(rú)何探知三维空间,如(rú)何对(duì)外界环境做(zuò)出精(jīng)确的建模却一直是个问题。
一款新出的机器人,不需(xū)要(yào)用电就能使其移动(dòng),而是采(cǎi)用了一种折叠(dié)方式,这是(shì)怎么做到的呢?我(wǒ)们(men)一起来看(kàn)看吧!
就在前段时(shí)间,哈佛大学的Wyss研究所像大众展示了他们的一款软体机器人,这个受折(shé)纸启发(fā)发明的软体折(shé)叠(dié)机器人叫Rollbot,它的长相非常简(jiǎn)单,但它确确实实是一(yī)个名副其实的机器人。

除(chú)此之外它的体型(xíng)非常(cháng)小,就是一张小卡片,可是一旦将这张小卡片放到(dào)桌面(miàn)上(shàng),它(tā)就能折叠往前跑。这是因为它是由一(yī)种叫液(yè)晶弹性(xìng)体的活(huó)性材料(liào)制成的(de),与热表面接触时就会折叠成五角轮自(zì)动前进,所以纸片能够自己动(dòng)起来不是因为活见鬼了,而是有一定的科学原(yuán)理的。
纸(zhǐ)片下面的板子(zǐ)也不是一(yī)块普通的板子,它的温度达到了200摄(shè)氏度,这是为(wéi)了给纸片提(tí)供(gòng)一个热环境。纸片通过(guò)折叠往前走,又(yòu)是如何控制自(zì)己的(de)运动(dòng)方向(xiàng)呢?其实是(shì)有一定(dìng)的规律的。

因为纸片的折叠位置是一个个(gè)在(zài)不同的温度下可以进行折(shé)叠的3D打印软铰链(liàn),其(qí)一侧在与热表面接(jiē)触时就可以折叠,然后推着轮子转向下(xià)一侧,只要离开热表面,就恢复(fù)成原(yuán)状,如此循环下去。
这样(yàng)一个完整的操作(zuò)过程实施下(xià)来,研发人员就可以(yǐ)对温(wēn)度、铰链的弯曲(qǔ)程度、折(shé)叠方向进行系统的编程,然后来控制纸片的运(yùn)动形(xíng)式,这样就可(kě)以按(àn)照一定(dìng)的轨迹(jì)前进了。
大多数的软体机器人其实都需要依(yī)靠外部电源来进(jìn)行控制的,但Rollbot却走了一个新路线,完全摒弃掉电(diàn)线,不用(yòng)电就能(néng)灵活地改变(biàn)自(zì)身的形状来适(shì)应(yīng)环境(jìng),这将为以后(hòu)的(de)机器(qì)人事业(yè)打造出(chū)了一条很有(yǒu)前景的道路。

太空探索,救援等多功能软(ruǎn)体机器人
据哈佛(fó)大学约(yuē)翰·A·保尔森工程与应用科学学院(下称(chēng)SEA)官网和Tech Explorist报道(dào),6月2日,哈(hā)佛大学(xué)约翰·A·保尔森工程与应用科学学院(SEA)的(de)研究(jiū)人员开发出了最新型的软体机器人(rén),它可(kě)以应用于(yú)太空探索、搜(sōu)索和救援系统、仿生学、医学手术与康复等领域(yù)。
这款新型机器人由空气驱动,并用(yòng)一个输入器代替了多个控制系统,使机(jī)器人在(zài)不受约束的同时(shí),还能简化控制、减轻重量(liàng)。

图片来源:Bertoldi Lab/Harvard SEAS软(ruǎn)体机(jī)器人被业内(nèi)视为(wéi)机器人技术的(de)未来,相较于硬性机器人而言,它有(yǒu)可(kě)挤入(rù)狭小空间、碰撞后能尽快恢复等优点。
但目前(qián)来说,软体(tǐ)机器人在设(shè)计上(shàng)仍有(yǒu)许多局限。其中最大的一个(gè)问题就是,软体机(jī)器(qì)人通常需要拴在输入线上,这意(yì)味着它们(men)必须通过提供压(yā)缩空气(qì)的管(guǎn)道和控制(zhì)其系统的(de)电(diàn)线与外部设备相连。但这些管道(dào)和(hé)电线(xiàn)在很(hěn)大程度上束缚了软体机器人功能的(de)发(fā)挥(huī)。
而如今哈佛(fó)大学研发的这款(kuǎn)软体(tǐ)机器人(rén),则可将其驱动(dòng)过程大大(dà)简化,从而解决这(zhè)一难题。
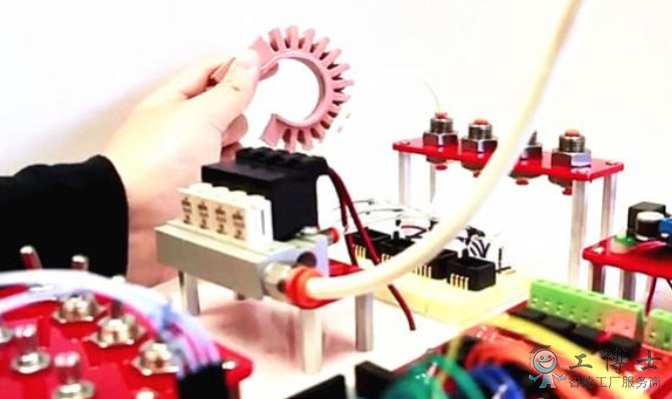
该机器人被(bèi)设计(jì)成十字形,有四条“腿”,每条“腿”都相当于一(yī)个执行器,各执行器(qì)上含有八个(gè)由细小通道连接的气室,顶部则留有(yǒu)七条接口(kǒu),用于接通输送压缩空气的管(guǎn)道。

图片来源:Bertoldi Lab/Harvard SEAS这项研究论文发表在(zài)《软体机器人学(xué)》杂志上(shàng)。
哈佛大学应用力(lì)学教授卡(kǎ)蒂娅·贝尔托迪(Katia Bertoldi)在论文中表(biǎo)示,该项研(yán)究首次提出了这种基于(yú)流体粘性现象来(lái)制造软体(tǐ)机器人的方(fāng)法。使用该方法的软体机器人其驱动结构(gòu)将比以(yǐ)往的更(gèng)为(wéi)简单、容(róng)易。
该方法通过(guò)使(shǐ)用不同直径的管子来控制空气在软(ruǎn)体机器人(rén)装置(zhì)中的移(yí)动(dòng)速度,即(jí)一次(cì)性(xìng)通(tōng)过其中一个管(guǎn)泵输送相同数(shù)量的空气,管的大小将(jiāng)决定空气流动的方式和位置。
比如将三根直径为(wéi)0.79mm、长度相同的管(guǎn)子接在(zài)机器人(rén)上,再接(jiē)通一(yī)根(gēn)直径为0.38mm的长管输送气(qì)流(liú)。它其中的(de)一条“腿”就能充满空气并弯曲(qǔ)起来,而另外三(sān)根上接通的管(guǎn)道由于直径更粗(cū)并(bìng)且长度(dù)相同,因此输(shū)送压缩空气的时间较短,其余(yú)三端可几乎同时(shí)鼓起落下。

图(tú)片来源:Bertoldi Lab/Harvard SEAS不同长度的管子分别接在机器人顶部的接口(kǒu)上,不同的粗(cū)细、长(zhǎng)度和接通方式都会对(duì)机器人的运动方式有(yǒu)所影响。
例如将四条直径均为0.38mm,长度(dù)分别为78.6cm(输(shū)入空气)、10cm、43.7cm及122.4cm的管子配(pèi)置(zhì)于该机器人(rén)上,并将这(zhè)些(xiē)管子按顺序连(lián)接(jiē)起来,接通压缩空气。
那么该机器人的执行(háng)器最终(zhōng)会按照设定好的顺序(xù),即右-上下-左(zuǒ)的顺(shùn)序依(yī)次进(jìn)行弯曲,从(cóng)而向前爬行。

图片来源:Bertoldi Lab/Harvard SEAS如果将管子接(jiē)口的位置和次序(xù)调(diào)换一下,执行器充气的顺序就(jiù)会发生(shēng)变化,利用这一(yī)方式,该(gāi)机器人即可实现不同方向(xiàng)的运(yùn)动。
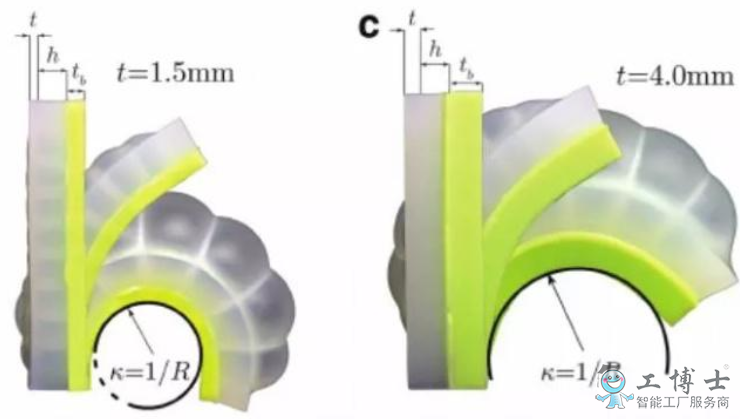
此外(wài),由于每个执行(háng)器的大小、厚度不尽(jìn)相同,在输(shū)入等(děng)量空气时,弯曲的程度也不同,因此(cǐ)运动的距离也会有所差别。
但由(yóu)于输(shū)入压缩空气的速度与量是不变的(de),调控管子就能够决定空(kōng)气输送的位置和顺序。因此它不再需要复杂的空气压缩(suō)计算和控制。
图片(piàn)来(lái)源:Bertoldi Lab/Harvard SEAS研(yán)究人员尼古拉斯(sī)·瓦西奥(Nikolaos Vasioses)表示,在这项研究之前,人们还不能在没(méi)有独立控制每个驱动器的情况下(xià),通过单(dān)独的输入线、压力源以及复杂的驱动过程来构建(jiàn)软体机器(qì)人。
该项目(mù)是(shì)人们朝着完(wán)全不受约束的简(jiǎn)单驱动(dòng)软体机器人(rén)研发迈(mài)出的重要一步。
在(zài)科(kē)技的不断进步(bù)下,软(ruǎn)体机(jī)器人的结(jié)构会不断完善,在未(wèi)来的发展空间(jiān)越来越(yuè)广。









警察(chá)")


