
 资讯(xùn)
资讯(xùn)疫情(qíng)防控期间,机器人大火(huǒ)了一把,不管是服(fú)务(wù)机器人还是(shì)工业机器人,都是妥妥的疫情“战士”。服(fú)务机器人(rén)在抗战(zhàn)一线帮忙医务(wù)人(rén)员(yuán)处理患者疫情,配(pèi)送物资,检测体(tǐ)温等。工业机器(qì)人在(zài)企业工厂代(dài)替人们(men)加快企业的复(fù)工复产,尽量减少疫情给企业赵成的(de)损失。那些方(fāng)脑袋、圆(yuán)脑袋、高(gāo)个(gè)子、短身材,这些“大白(bái)、小白”们7×24小时,活跃在火车站、高速入口、医(yī)院甚至方舱的抗疫防护现(xiàn)场,“战”能送药监控、报警查房(fáng),“休”可卖萌(méng)逗乐、带操领舞。身负AI、IoT等高超(chāo)武艺(yì),干着(zhe)暖心的(de)差事,它(tā)们(men)就是(shì)抗疫中的机器人。
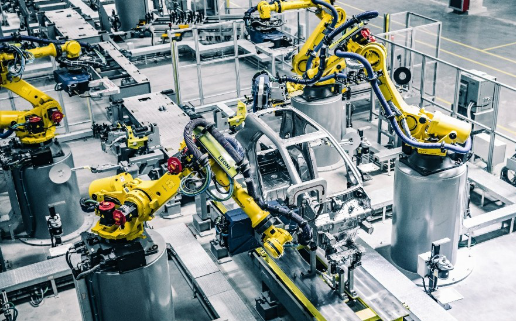
随着(zhe)工业制(zhì)造(zào)技术的(de)高速发展,各行业生产工厂的自动化(huà)智能化(huà)程(chéng)度越来越高,机械臂、协作(zuò)机器人、移(yí)动机器人等各种类(lèi)型工(gōng)业机器人也逐渐成为智能(néng)工厂的标配。机械臂取代人(rén)工完成大部(bù)分生产自动(dòng)化环(huán)节,大(dà)幅(fú)提(tí)升了生产效率提升产能(néng),而(ér)移(yí)动机器人则实现各环节物流的自动对接和流转,真正实(shí)现了无人化生产(chǎn)。
对于(yú)传统的工业机械臂来说,由于机身位置固(gù)定、运动半(bàn)径受臂展大小的限制导致作业范围被限定,很多公司开始(shǐ)尝试(shì)将机械(xiè)臂和(hé)移(yí)动机器人进行搭配(pèi)和组装,集合成具备(bèi)更多功(gōng)能、能处理更(gèng)多环(huán)节工作的“复合型机器人(rén)”,意图让机(jī)械臂的(de)作业(yè)地点不再受限,触达以往不能触达的(de)地方,用以(yǐ)满足车(chē)间自动化设备柔(róu)性化(huà)生产的需求。
复(fù)合机器人是手脚两(liǎng)项功(gōng)能集于一身(shēn)的新型机器人(rén),在以(yǐ)往的机(jī)器人世界里(lǐ),通用的工业机(jī)器人被称(chēng)为(wéi)机械臂;而(ér)智能移(yí)动机器(qì)人则是(shì)用以代替(tì)人腿脚的功能,用以移动和(hé)控制方(fāng)向(xiàng)。复合(hé)机器人则是合(hé)两者(zhě)之长,手脚并(bìng)用,将两种功能组合(hé)在(zài)一(yī)起。
可传统的工业机械臂由于机(jī)身太重、对自主移动机器人的负载太大(dà)、臂展刚性太大、安全性达不到保证等缘(yuán)故,并不适用(yòng)于作为复合机(jī)器(qì)人的“手”,于(yú)是便想到了用协作(zuò)机器人代替(tì)工业机械臂来充当这只“手”。
协作机器人相较(jiào)于传统的工业(yè)机械臂(bì)虽然负载会小很多,但价(jià)格低廉,使用方便,更重要的是它们(men)的适(shì)应性很强,更灵(líng)活(huó)且安全性高,与发(fā)展了几十年的工业机器人相(xiàng)比,它可以(yǐ)直接与生产(chǎn)现场工作人(rén)员协同合作,确保安全(quán)性基础上提升自动化程度(dù)及工作效(xiào)率。UR、非夕(xī)、遨博、艾利(lì)特等(děng)大批国内外知名的协作机器人品(pǐn)牌也应运而生。
移动机器人作为复合(hé)机器(qì)人的“脚”来(lái)说是复合机器人(rén)非常重要的部(bù)分,按(àn)照导航方式目前主要有磁(cí)条导航、二维(wéi)码导航、激光(guāng)SLAM导航(háng)和视(shì)觉导航(háng)几种类(lèi)型。而激光(guāng)SLAM导航的移动(dòng)机(jī)器人因为导航稳定、环境适应(yīng)强、自(zì)主(zhǔ)移动等众多优点是目前成为大多(duō)数复合机器(qì)人(rén)主要(yào)选择(zé)。
基于激光(guāng)SLAM导(dǎo)航的自主移动机器人的复合机器人不需要借(jiè)助任何辅助标(biāo)记,无需改造工厂环境,遇到人员和货物都能自主避障和绕(rào)行。由移动(dòng)机器人调度系统统(tǒng)一调配,实现柔性的(de)智(zhì)能生产。复合(hé)机器人有利于(yú)提高原材料配件的传送、工件的装卸以及机器的装配等(děng)自动(dòng)化程度(dù),从而可以提高劳动生产效率,降低生产(chǎn)成本,加快实现工业生产机(jī)械化和自动化的步伐。
复合机器(qì)人即可部分或全(quán)部代替人安全地(dì)完成恶劣环境下的(de)危险作业(yè),大大地改善工(gōng)人的(de)劳动条件。同时,一些(xiē)简单但又繁琐的搬运工作可以(yǐ)由复合机器人来代替(tì),可以避(bì)免由于人操作疲劳(láo)或(huò)疏忽而造成(chéng)损失(shī)。复合机器人完成了一道工序就可以进行下一道工(gōng)序,具有较高的灵活性。并且多台复合机器人组成移动的(de)装配台、加工台使用,可形成(chéng)高度柔性生产线。
目前,复(fù)合机器人(rén)在(zài)3C电子、医疗、日化品、机加(jiā)工(gōng)等制(zhì)造业的零部件组(zǔ)装环(huán)节应用的越来越(yuè)广泛复合型机器人可用于加工工件的抓(zhuā)取、组装、搬运、装卸等作业。此外,复合机(jī)器人(rén)也可快速布局于自动化(huà)工厂(chǎng)、仓储分拣、自动(dòng)化货物超市等(děng)诸多场景,为物(wù)料的自动搬运、物品的上下料,以(yǐ)及物料的分拣(jiǎn)提供自动化、柔性化的作业支(zhī)持,使厂内物(wù)流可以实(shí)现真正的“无人搬运”。
随着(zhe)工业4.0的不断深化,使得工业机器人从(cóng)第(dì)三阶段向第四阶段过渡(dù),解决柔性生(shēng)产课题。而回归(guī)我国制造业的(de)现实(shí)情况,目前的发展(zhǎn)策略是力争实现(xiàn)弯道超车,自动化、信息化、智能化同步(bù)推进,在中(zhōng)国制造2025明确提出,以智能(néng)制造为主线,加快两化融(róng)合(hé)。在此(cǐ)大背景下,不难(nán)预估复合(hé)机器人将会很大的应用空间和发展前景(jǐng)。
2019年的东京机(jī)器(qì)人(rén)展上,与上(shàng)一届展会最大的区别(bié)就(jiù)是,各大机器人(rén)展商都不约而同(tóng)的展示在(zài)不同(tóng)场景(jǐng)下(xià)复合机(jī)器(qì)人的展(zhǎn)示,似(sì)乎(hū)也印(yìn)证了复合机器人的发展趋势。将(jiāng)来,想(xiǎng)必更(gèng)多(duō)的协作机器(qì)人厂商和(hé)移动机(jī)器人厂商会更多(duō)的(de)合作,共同去(qù)解决复合机器人负(fù)载太(tài)小、无法触地、更快捷通信、产品/行业标准等课题,更快的实现复合机器人的产品化以(yǐ)及快速(sù)发展和大规模应用。










信息")
良信息举报中(zhōng)心")
110")